JC-3 Series Cartesian Robot

<Standard Accessories>
- Power Cable
- TPU Short Connector
- SW-BOX Short Connector
- EMG-OUT Connector
- Box Mounting Plate
- Operation Manual (CD-ROM)
<Optional Attachments>
- With Emergency Stop Switch
- With Emergency Stop/Enable Switch
- With Initialization Switch
- With Initialization Switch/Mode Changing Switch
- With Intialization Switch/Purge Switch
- With Initialization Switch/Mode Changing Switch/Purge Switch

- Cable Set (for robot to controller connection: 3m/5m)
- Cable Carrier Set (for X Axis/Y Axis)
- I/O-SYS cable, I/O-1 cable
- Needle Adjuster
- PC Software JR C-PointsⅡ (WindowsR 7/ WindowsR 8.1/ WindowsR 10 compatible)
We ship the robot disassembled, packing each axis as an individual unit.
Please assemble the robot upon delivery. In addition to the specifications listed above, other specifications may also be available.
Please contact us for more information.
Optional specifications are available only when placing your order; no post-order modifications.
Specifications may change without prior notice to improve product quality.
JC-3 Series Cartesian Robot
Specifications:
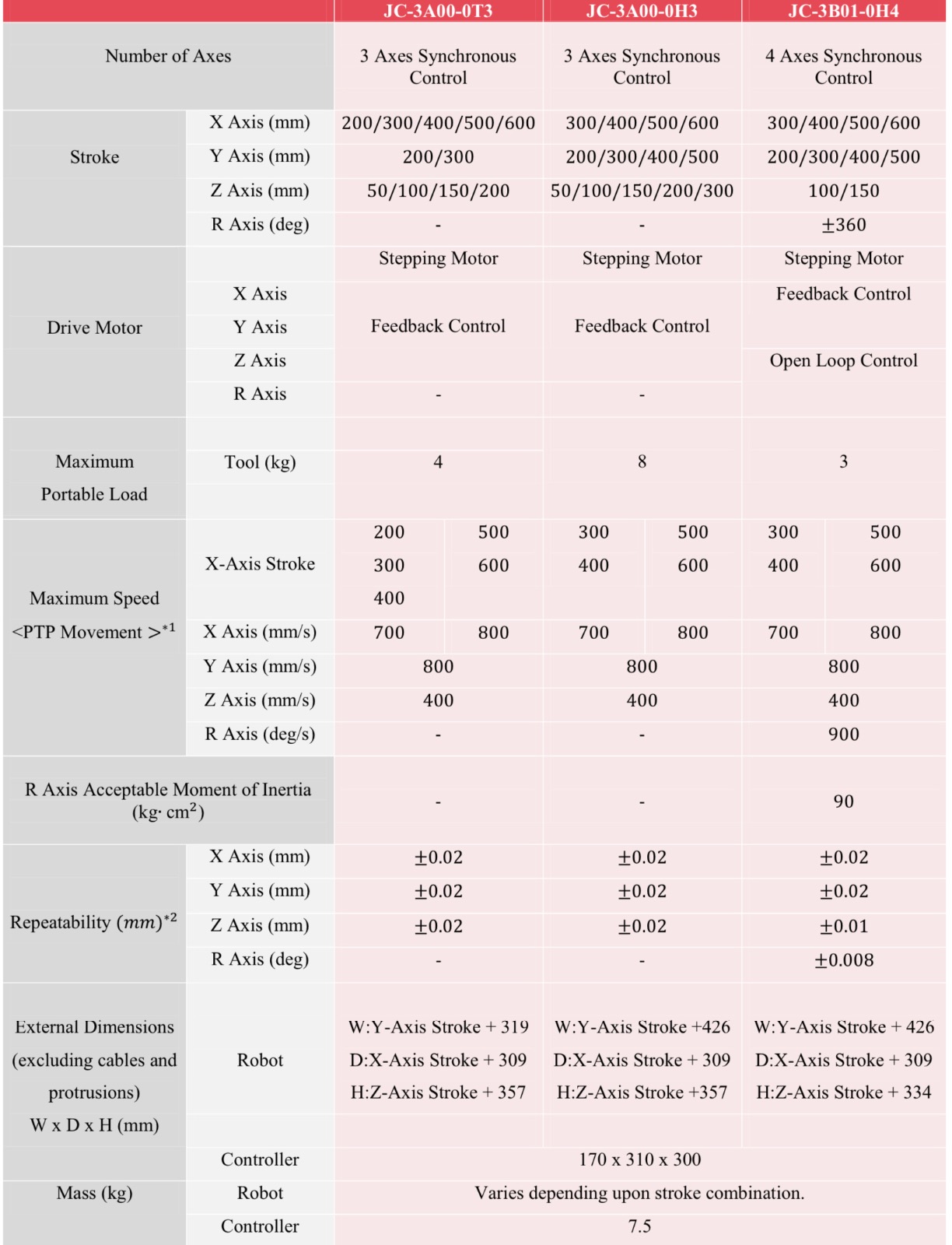
- *1 This value reflects the maximum portable load when measured with all the axes assembled. For information about acceleration rates, please refer to the speed & acceleration materials in the Catalogue section of our Catalogue and Diagram Download page. Maximum speed may be unreachable depending upon the tool attachment setup. The X and Y axes individual unit speed and acceleration are 800mm/s and 5000mm/s2 respectively.
- *2 Repeatability measured at a constant temperature, so absolute precision is not guaranteed.
These values are for standard models and may differ with specification modifications.
Please contact us for details.
Common Specifications
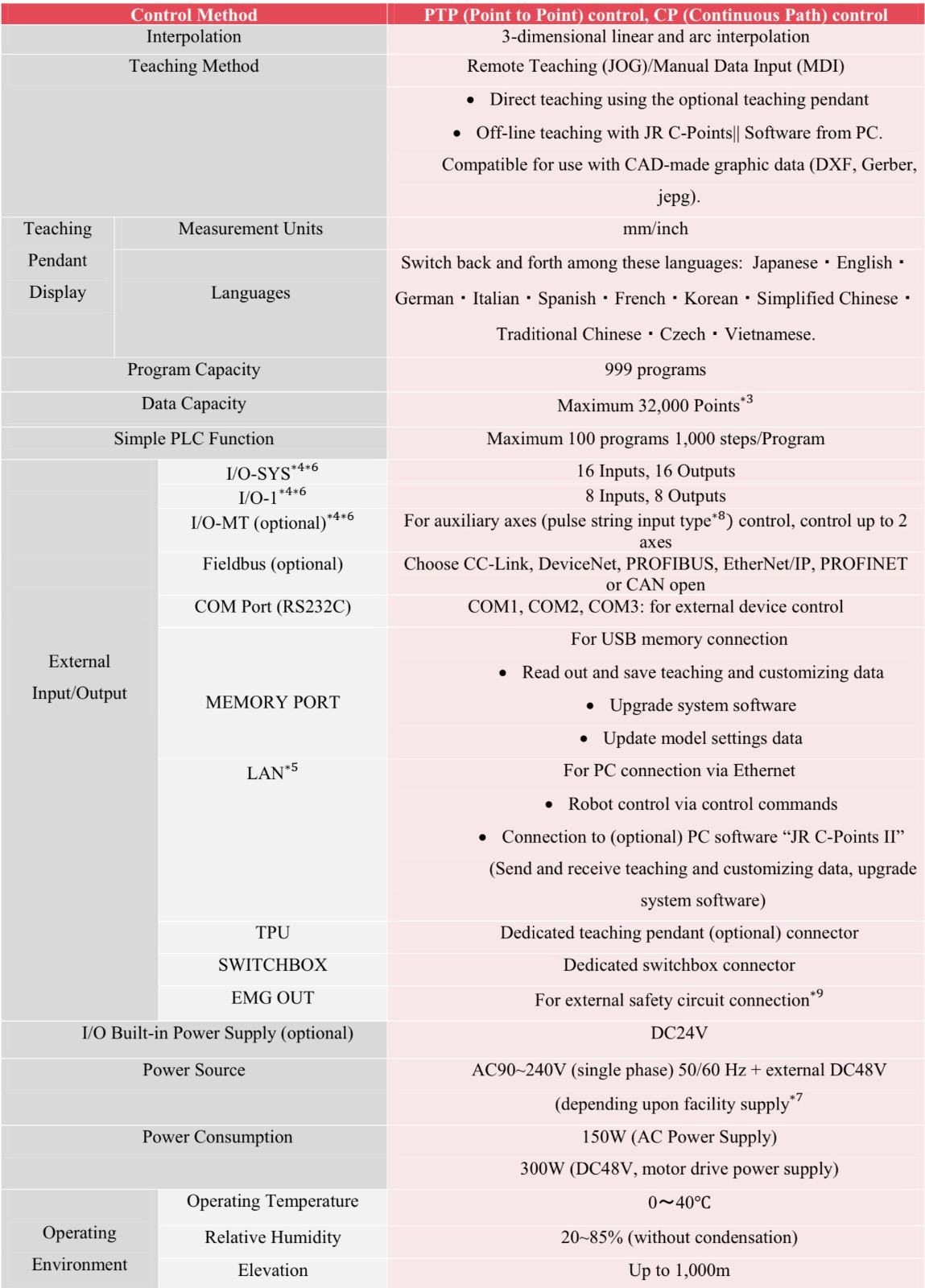
- *3 Point data capacity reduces as the total function data setting/point job data/sequencer data increases, due the shared data storage area.
- *4 When using an internal power supply, an (optional) built-in I/O power supply is required.
- *5 LAN connection is 10BASE-T, 100BASE-TX.
- *6 There are two types of I/O polarity: NPN specifications and PNP specifications.
- *7 With the 4 Axes Specifications, the XY Axes are powered externally at 48V, while the ZR Axes use a 24V control power supply.
- *8 We ask customers to please prepare their own control power supply, pulse motor and motor driver.
- *9 We ask customers to please construct their own safety circuit.




