JR 3000 SERIES (DISPENSING WITH CAMERA SPECIFICATION)
<Standard Accessories>
Switchbox
Teaching Pendant (for use with the robot)
Operation Manual (CD-ROM)
PC Software “JR C-Points II” Dispensing with Camera Specifications (WindowsR 7, WindowsR 8.1, WindowsR 10 compatible)
Case Studies Application
JR 3000 SERIES (DISPENSING WITH CAMERA SPECIFICATION)
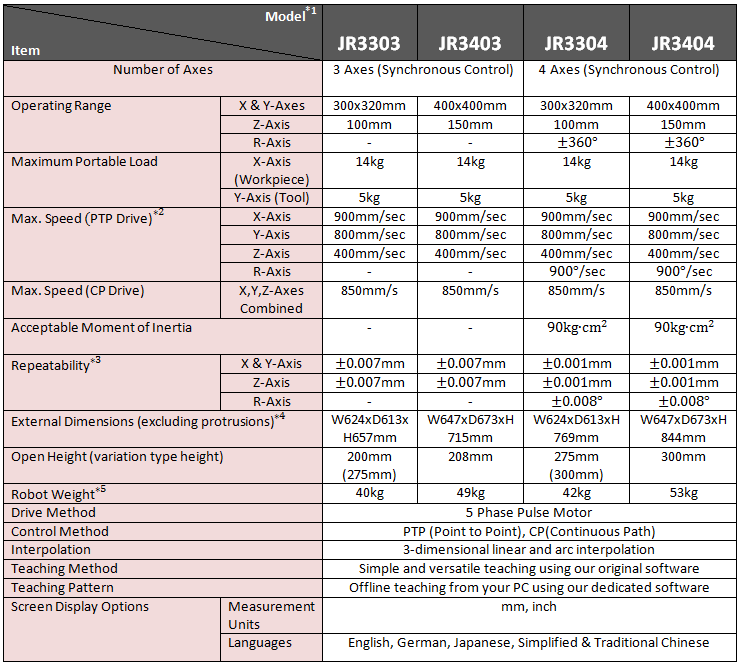
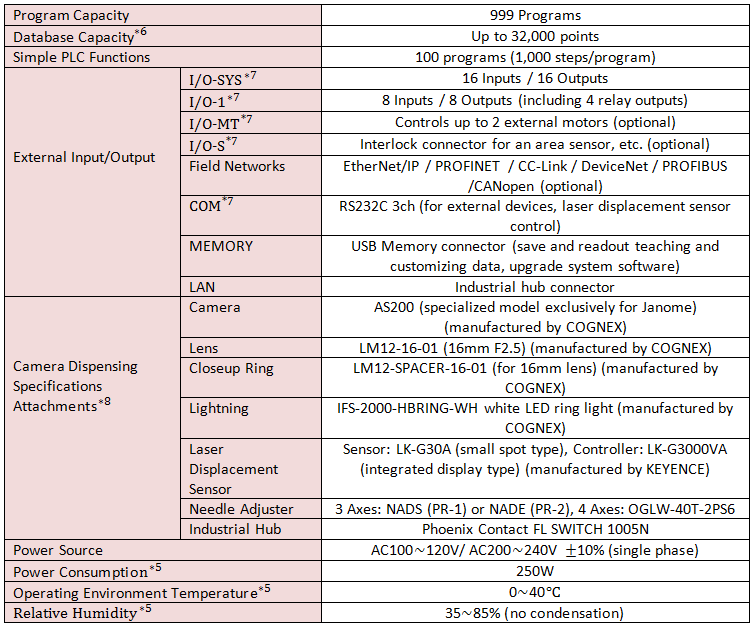
Specifications:
*1 All models are double column types.
2* Maximum speed can vary depending upon conditions.
3* Repeatability was measured at a constant temperature and does not represent a guarantee of absolute precision.
4* When the Y-Axis is at its full stroke, the cable carrier protrudes outward from the robot unit.
5* Values are for the robot with peripheral devices attached.
6* Point data memory capacity reduces as additional function data settings/ point job data/ sequencer data are added, due to the shared data storage area.
7* For the purpose of system configuration, some of these connections are assigned in advance.
8* We request customers to please prepare the PC (and connecting cable) and dispenser at their side.
Optional specifications are available only when placing your order; no post-order modifications.Specifications may change without prior notice to improve product quality.
JR 3000 SERIES (DISPENSING WITH CAMERA SPECIFICATION)
Specifications:
*1 All models are double column types.
2* Maximum speed can vary depending upon conditions.
3* Repeatability was measured at a constant temperature and does not represent a guarantee of absolute precision.
4* When the Y-Axis is at its full stroke, the cable carrier protrudes outward from the robot unit.
5* Values are for the robot with peripheral devices attached.
6* Point data memory capacity reduces as additional function data settings/ point job data/ sequencer data are added, due to the shared data storage area.
7* For the purpose of system configuration, some of these connections are assigned in advance.
8* We request customers to please prepare the PC (and connecting cable) and dispenser at their side.
Optional specifications are available only when placing your order; no post-order modifications.Specifications may change without prior notice to improve product quality.